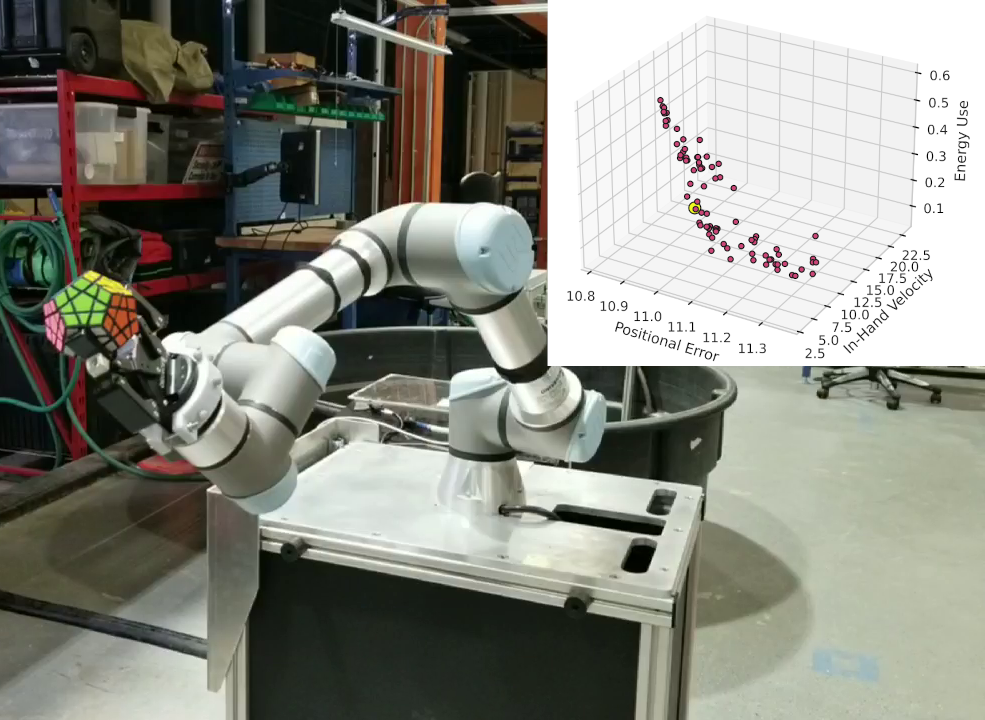
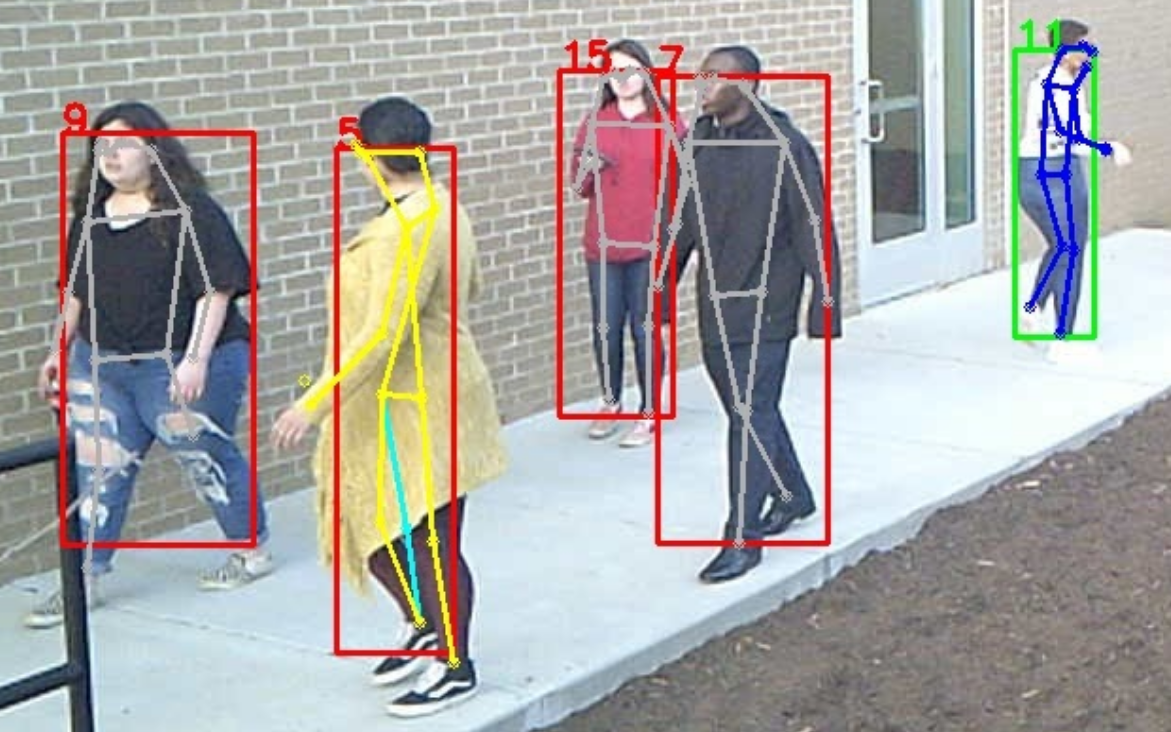
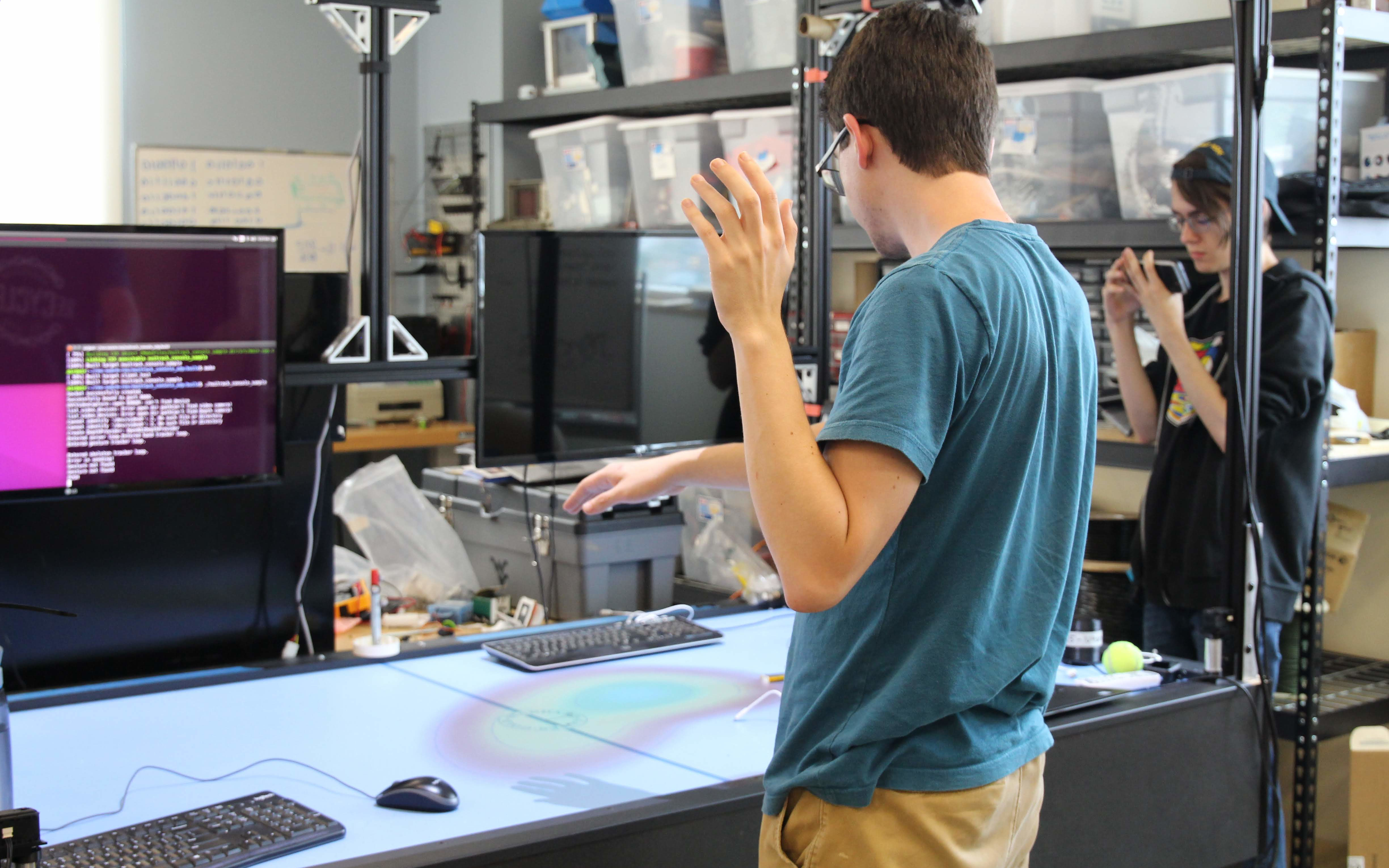
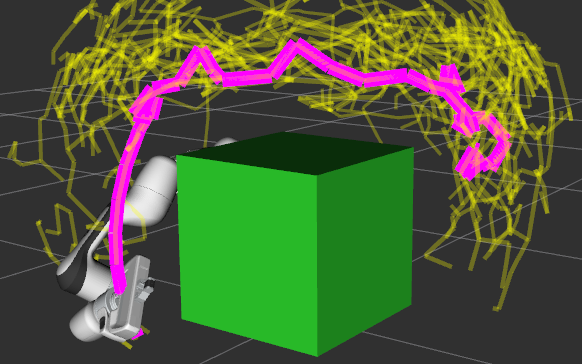
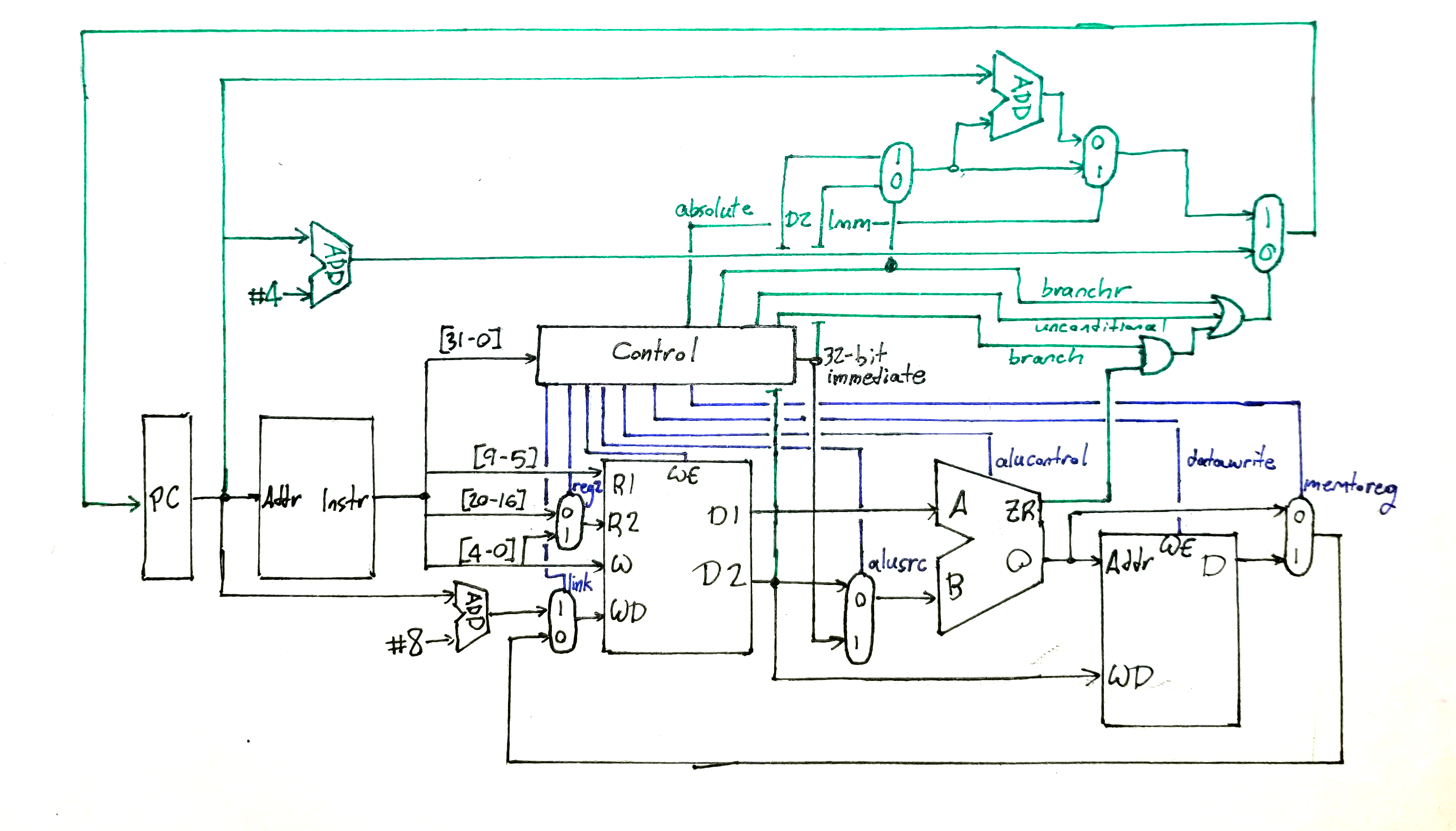
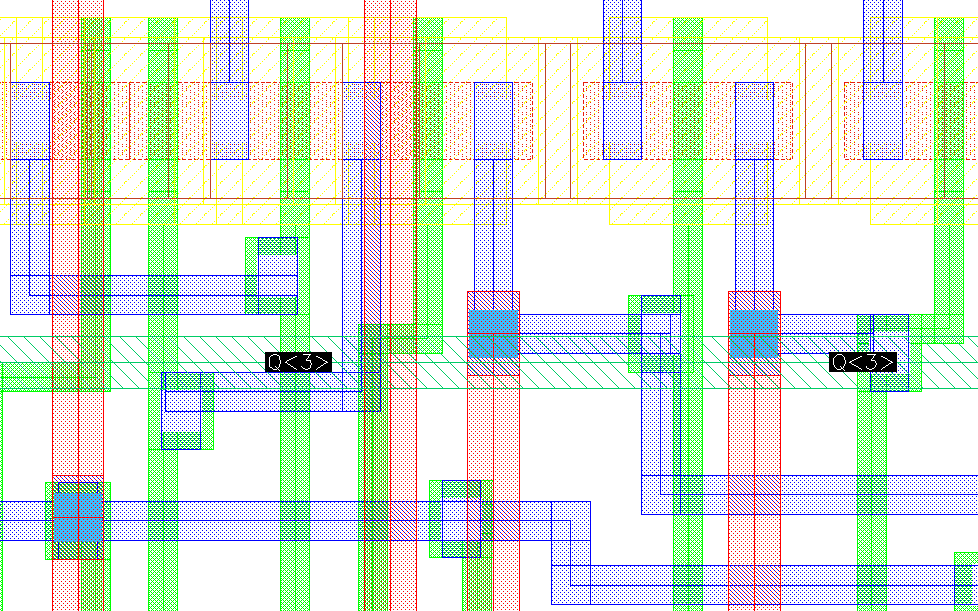
Large Multiobjective Manipulator Control Learning what matters when to complete challenging, sparsely-rewarded manipulation tasks PCT Section Hike Taking a very long walk across Oregon Giants of Corvallis A living record of redwoods and giant sequoias in Corvallis Anonymized Smart Cities Full-stack prototype for real-time, privacy-aware pedestrian detection from video Human-Swarm Interaction REU project to develop a low-cost interactive robotic swarm testbed Socially-Legible Reinforcement Learning Aligning RL policies with pedestrian social conventions Bite-Size RRT* in ROS Manipulator path planning using the native ROS MoveIt C++ bindings Monocular Depth Pipeline Measuring social distancing from monocular images VHDL CPU Designing a pipelined CPU from scratch, running a subset of the ARM ISA Accumulator Lithography Designing a 12-bit accumulator at the silicon level